Abstract
We propose REMANI-Planner: a motion planning method capable of generating high-quality, safe, agile and feasible trajectories for mobile manipulators in real time.
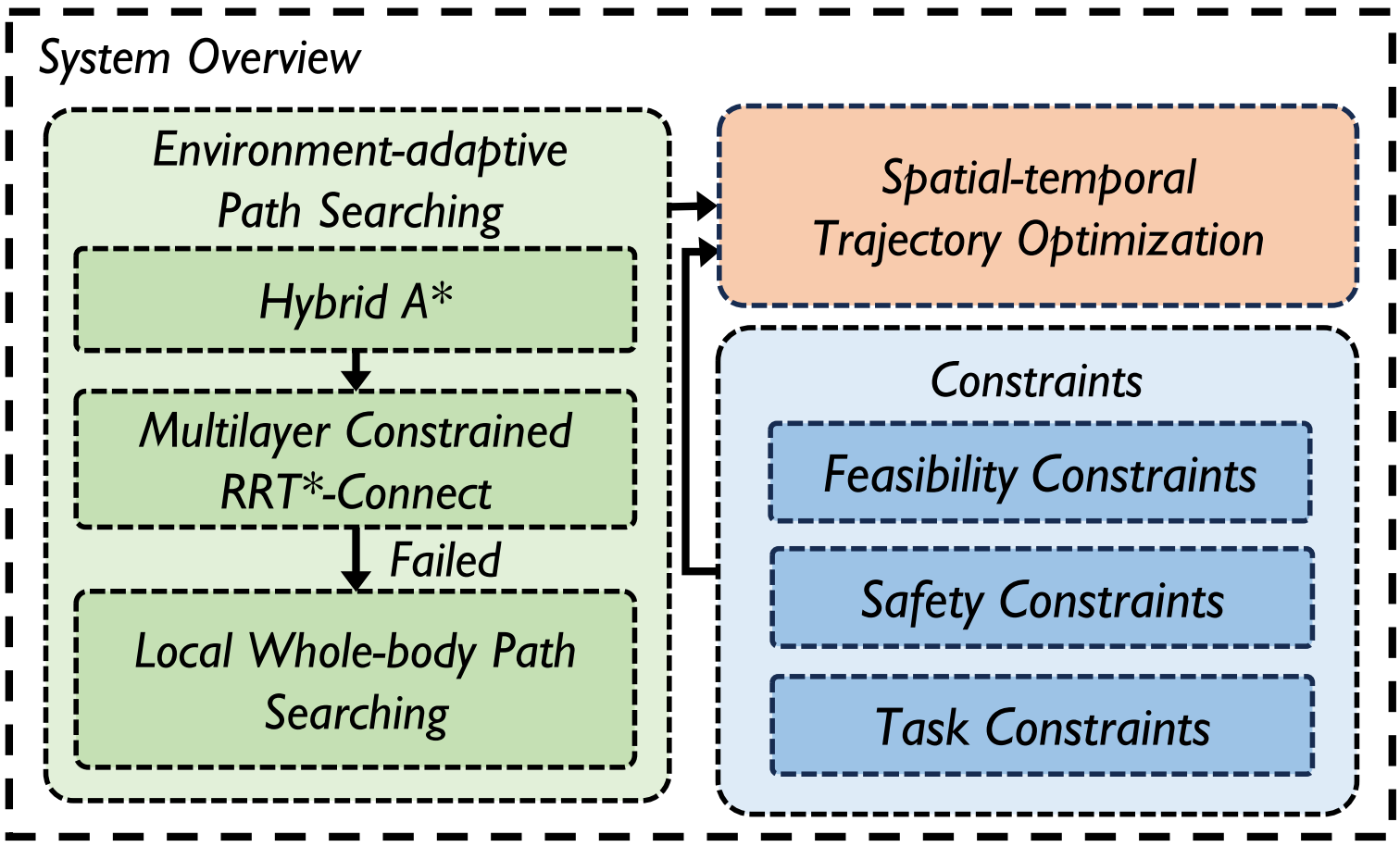
Mobile manipulators have recently gained significant attention in the robotics community due to their superior potential in industrial and service applications. However, the high degree of freedom associated with mobile manipulators poses challenges in achieving real-time whole-body motion planning. To bridge the gap, this paper presents a motion planning method capable of generating high-quality, safe, agile and feasible trajectories for mobile manipulators in real time. First, we present a novel environment-adaptive path searching method, which can generate paths in real-time in various environments by adaptively adjusting searching dimension based on environment complexity. Additionally, we propose a real-time spatial-temporal trajectory optimization method that takes into account the whole-body safety, agility and dynamic feasibility of mobile manipulators. Moreover, task constraints are applied to ensure that the trajectory can fulfill specific task requirements. Simulation and real-world experiments demonstrate that our method is capable of generating whole-body trajectories in real-time in challenging environments.